🚲 基于 STM32 + LVGL 的全地形导航仪表
嵌入式图形架构深度优化 | 离线地图调度与姿态感知实战复盘
🚀 核心亮点

中英文静态翻译映射与实时重绘
深色/浅色模式动态 UI 引擎
⚙️ 架构细节与选型
核心功能
- 离线地图:基于墨卡托投影的局部 GPS 地图映射。
- 姿态感知:集成陀螺仪,实时解算坡度与朝向。
- 硬件优化:支持深浅模式与中英双语动态切换。
- 数据融合:实时显示速度、经纬度、卫星数与电量。
硬件配置
- 主控:STM32F405RGT6 (Cortex-M4, 168MHz)
- 存储:SD Card (SDIO总线) 存放离线地图瓦片
- 屏幕:240*320 TFT (ST7789驱动) + 电容触摸
- 传感:ATGM336H (GPS) + LSM6DSM (六轴陀螺仪)
🔥 技术难点攻坚
难点一:SDIO+DMA 地图动态调度机制
为解决单片机 SRAM 无法承载高清离线地图的瓶颈,设计了“九宫格”加载机制。通过 SDIO 结合 DMA 直接从外部存储提取 BMP 原始像素并推入显示缓冲区,显著降低了 CPU 负载,实现了丝滑平移。
难点二:数据平滑滤波与线程安全
针对颠簸环境下的姿态抖动,引入了 滑动平均滤波算法 净化原始采样数据;同时利用 lv_async_call() 机制隔离外设中断与 GUI 渲染层,彻底规避了高频数据抢占导致的死锁问题。
💻 PC 模拟器验证阶段
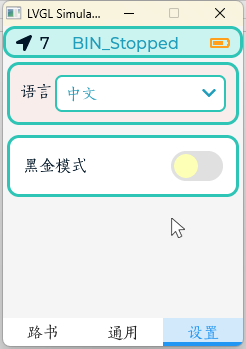
系统设置交互层
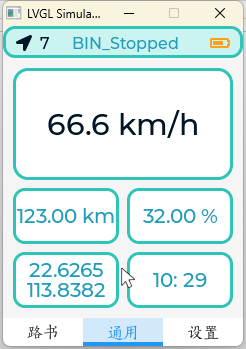
仪表数据监测页
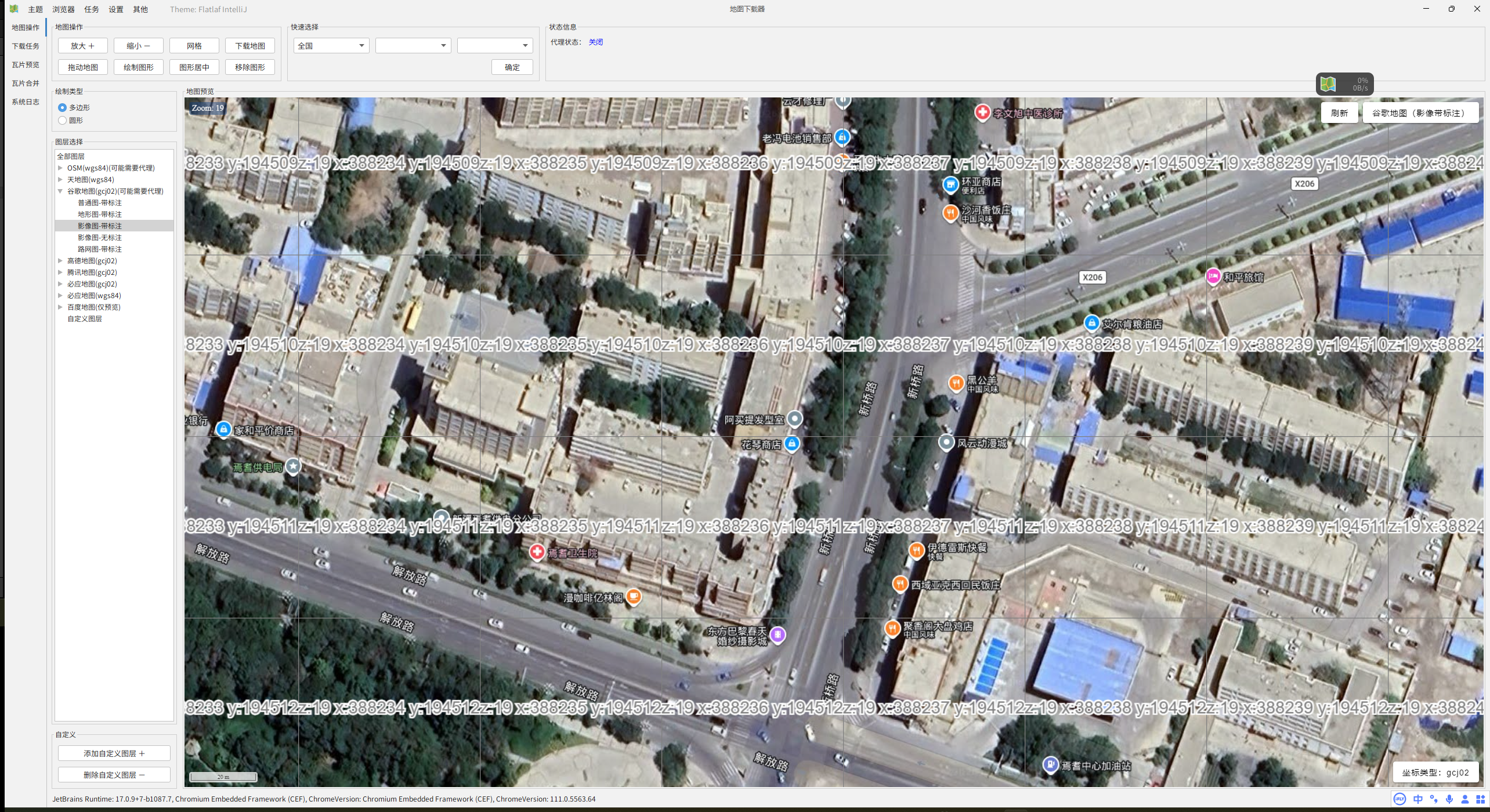
地图数据处理工具链
🛠️ 硬件打样与最终实机
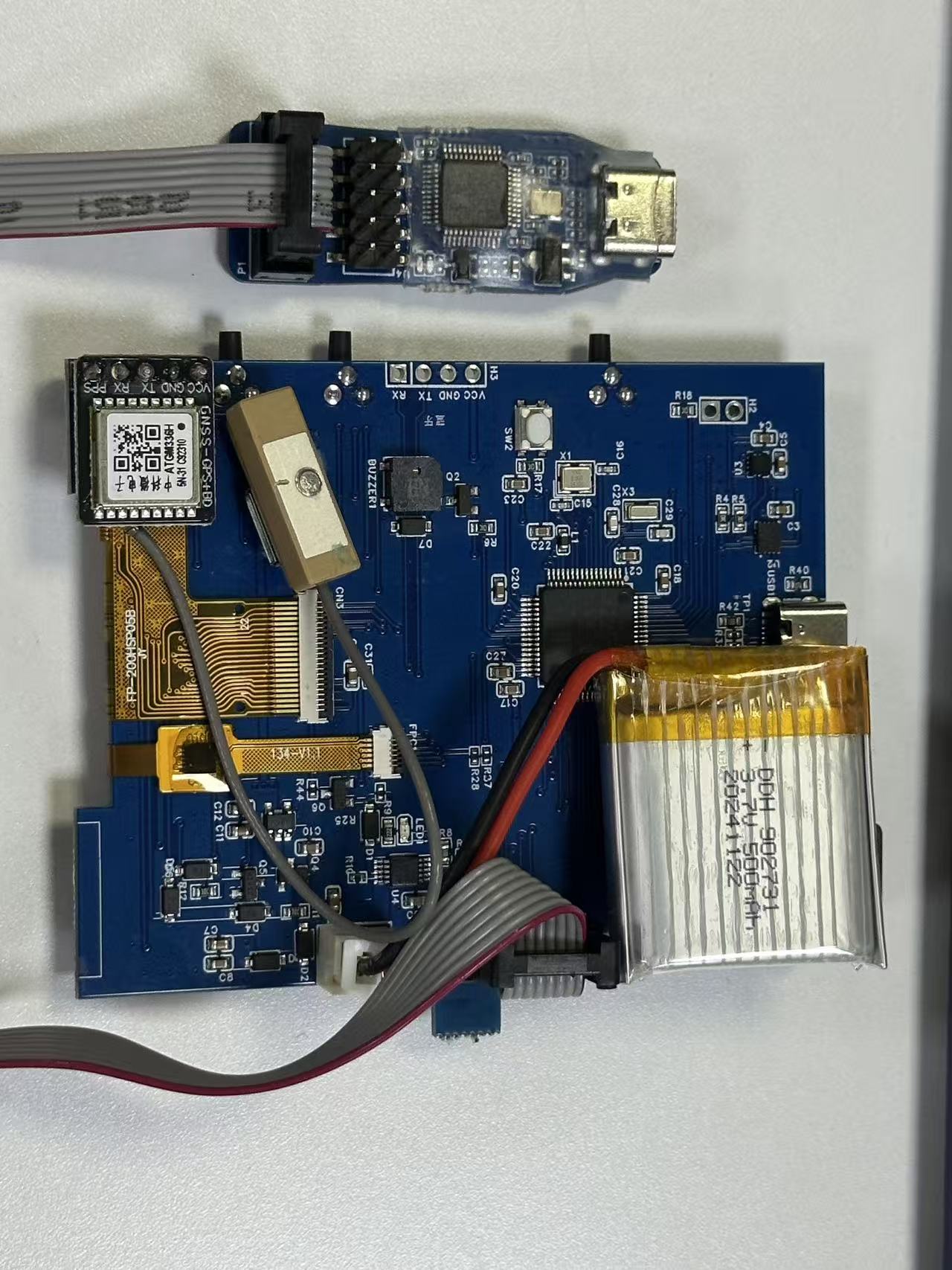
内部电路与排线布局
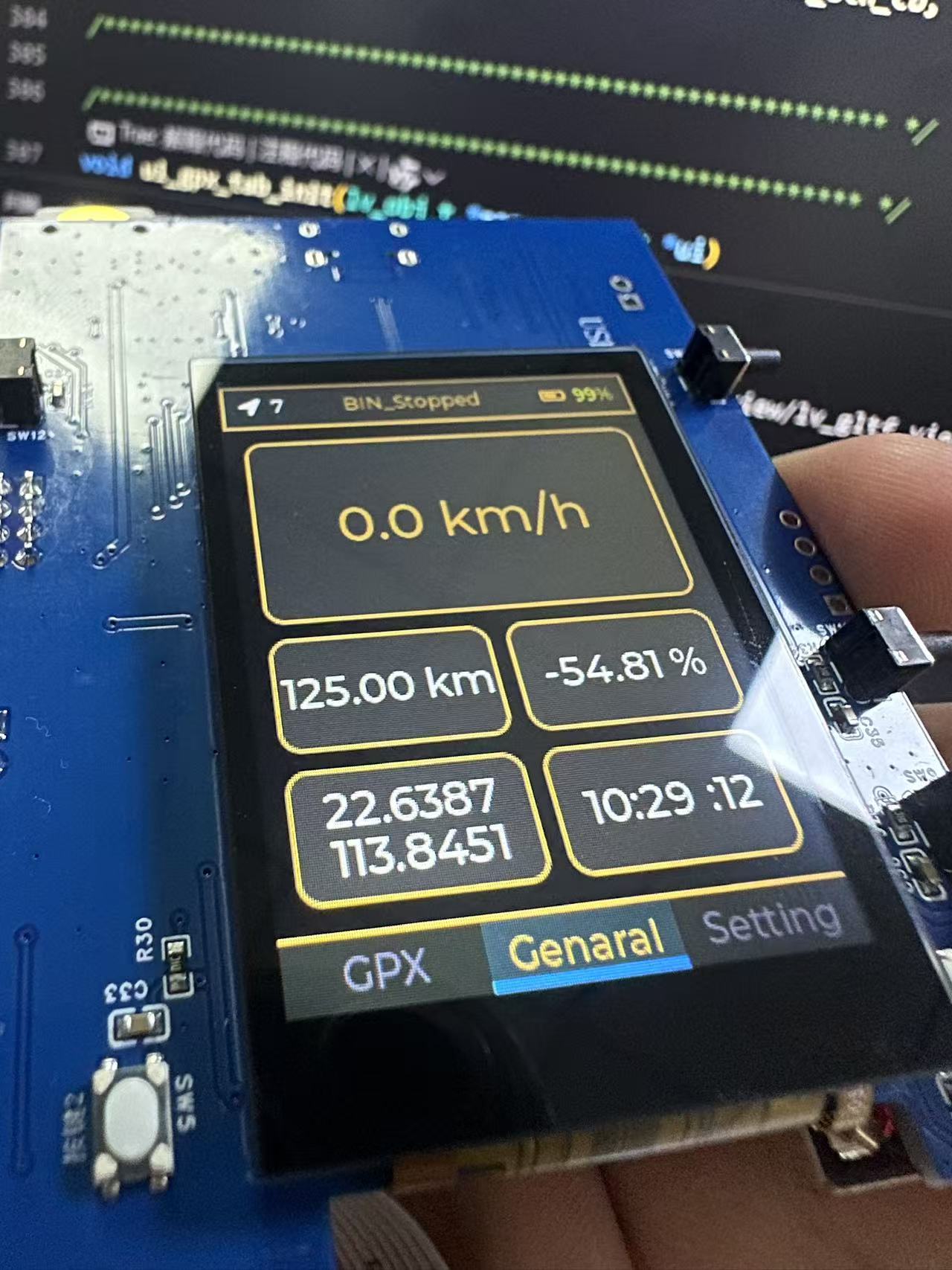
硬件实机运行 (深色模式)